

Ученые Политехнического университета Петра Великого разработали машину для диагностики электропроводов.
Диагностика ЛЭП привлекает внимание многих исследователей, и в ряде стран для проверки состояния проводов создаются специальные диагностические машины-автоматы. Разработанный в СПбПУ робот приспособлен для обнаружений мест неполадок при авариях в электрических сетях (это особенно актуально для ночного времени суток, когда сотрудникам электростанции сложно определить точное место неисправности). Также машина-автомат производит диагностические работы ЛЭП, что значительно экономит трудозатраты.
«Подобных разработок всего три в мире, – говорит ассистент кафедры "Машиноведение и основы конструирования" СПбПУ Мохаммад Реза Бахрами, – однако российский робот имеет более высокие качественные показатели». Работа существующих аналогов может быть нарушена из-за большой изгибной податливости проводов, поэтому современные машины могут передвигаться только по прямому заземленному кабелю (ground line). Наземные линии от обеих сторон, как правило, должны быть соединены друг с другом на каждой башне, соответственно, при отсутствии такого соединения машина не может пройти дальше. Более того, роботы, передвигающиеся по данному кабелю, не защищены от молнии, а на некоторых старых электростанциях и вовсе отсутствуют наземные линии. Разработанный же в Политехе робот может передвигаться по самой контактной сети (hot line), что дает ему преимущество перед современными аналогами.
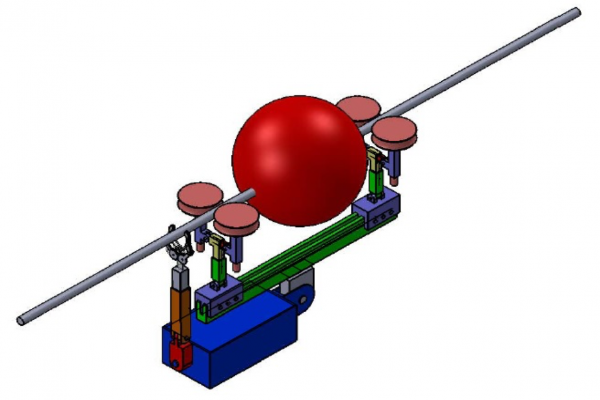
Робот-инспектор состоит из трех независимых частей: блока с двумя парами моторизованных ведущих колес, рамы с рукой и захватом и основной части для связи в одно целое. Механизмы робота позволяют ему переходить через различные препятствия на проводах (амортизаторы, зажимы, предупреждающие шары и т.д.). Также машина имеет GPS-датчик, благодаря которому можно отследить её местоположение.
На сегодняшний день ведутся расчеты и создан макет машины. Результаты работы были представлены 16-21 января в рамках 16-го международного симпозиума «TOPICAL PROBLEMS IN THE FIELD OF ELECTRICAL AND POWER ENGINEERING» and «DOCTORAL SCHOOL OF ENERGY AND GEOTECHNOLOGY III». По словам Мохаммад Реза, в работе сказано, что даже при медленном равномерном движении робота-инспектора могут возникнуть опасные интенсивные колебания без каких-либо внешних возмущений. На элементы машины начинают действовать значительные инерционные нагрузки, приводящие к отказам или разрушению. Математическое моделирование движения машины по проводам позволяет предсказать нежелательные явления, предотвратить аварии, избежать затратных и опасных экспериментов, а также оптимизировать конструкцию и режимы работы. На данный момент ученый ищет партнеров для сотрудничества и сборки действующего прототипа робота-инспектора.
Материал подготовлен Информационно-аналитическим центром СПбПУ
.jpg)